Cybenko, G. (1989). Approximation by superpositions of a sigmoidal function. Mathematics of Control, Signals, and Systems, 2(4), 303-314. (关于Sigmoid激活函数的初始普遍近似定理)
Hornik, K., Stinchcombe, M., & White, H. (1989). Multilayer feedforward networks are universal approximators. Neural Networks, 2(5), 359-366. (关于更一般的激活函数的普遍近似定理)
Barron, A. R. (1993). Universal approximation bounds for superpositions of a sigmoidal function. IEEE Transactions on Information Theory, 39(3), 930-945. (关于误差收敛速度的Barron定理)
Pinkus, A. (1999). Approximation theory of the MLP model in neural networks. Acta Numerica, 8, 143-195. (关于普遍近似定理的深入综述)
Goodfellow, I., Bengio, Y., & Courville, A. (2016).Deep Learning. MIT Press. (第6.4章:深度学习教科书。包含与普遍近似定理相关的内容)
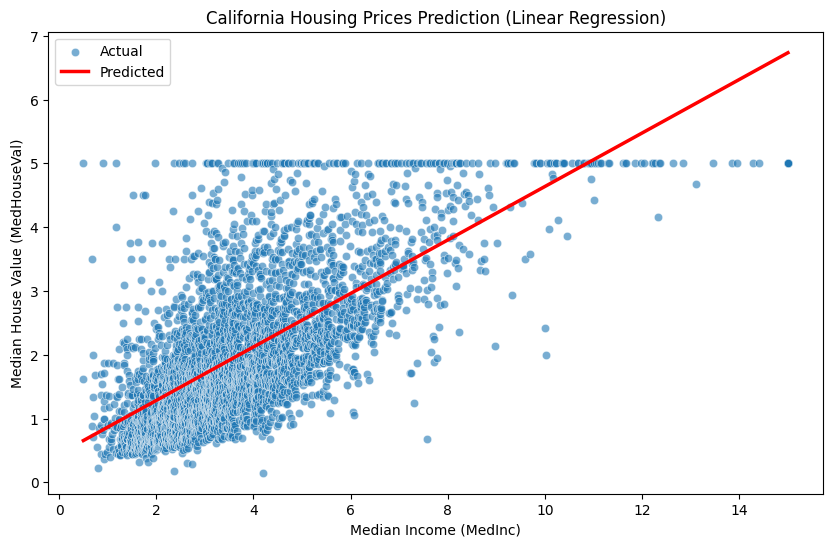
import numpy as npimport pandas as pdimport seaborn as snsimport matplotlib.pyplot as pltfrom sklearn.datasets import fetch_california_housingfrom sklearn.linear_model import LinearRegressionfrom sklearn.model_selection import train_test_split# Load the California housing datasethousing = fetch_california_housing(as_frame=True)data = housing.frame# Use only Median Income (MedInc) and Median House Value (MedHouseVal)data = data[["MedInc", "MedHouseVal"]]# Display the first 5 rows of the dataprint(data.head())# Split the data into training and testing setsX_train, X_test, y_train, y_test = train_test_split( data[["MedInc"]], data["MedHouseVal"], test_size=0.2, random_state=42)# Create and train a linear regression modelmodel = LinearRegression()model.fit(X_train, y_train)# Make predictions on the test datay_pred = model.predict(X_test)# Prepare data for visualizationplot_data = pd.DataFrame({'MedInc': X_test['MedInc'], 'MedHouseVal': y_test, 'Predicted': y_pred})# Sort for better line plot visualization. Crucially, sort *after* prediction.plot_data = plot_data.sort_values(by='MedInc')# Visualize using Seabornplt.figure(figsize=(10, 6))sns.scatterplot(x='MedInc', y='MedHouseVal', data=plot_data, label='Actual', alpha=0.6)sns.lineplot(x='MedInc', y='Predicted', data=plot_data, color='red', label='Predicted', linewidth=2.5)plt.title('California Housing Prices Prediction (Linear Regression)')plt.xlabel('Median Income (MedInc)')plt.ylabel('Median House Value (MedHouseVal)')plt.legend()plt.show()# Print the trained weight (coefficient) and bias (intercept)print("Weight (Coefficient):", model.coef_[0])print("Bias (Intercept):", model.intercept_)
import numpy as np# Set input values and target valuesX = np.array([[1.5, 1], [2.4, 2], [3.5, 3]])y = np.array([2.1, 4.2, 5.9])learning_rate =0.01# Adding the learning_rate variable here, even though it's unused, for consistency.print("X =", X)print("y =", y)
X = [[1.5 1. ]
[2.4 2. ]
[3.5 3. ]]
y = [2.1 4.2 5.9]
学习率设置为0.01。学习率是影响模型学习速度和稳定性的超参数。初始化权重和偏置。
Code
m, n = X.shape# Initialize weights and biasweights = np.array([0.1, 0.1])bias =0.0# Corrected: Bias should be a single scalar value.print("X.shape =", X.shape)print("Initial weights =", weights)print("Initial bias =", bias)
import numpy as npclass BaseLayer():# __init__ can be omitted as it implicitly inherits from 'object' in Python 3def forward(self, x):raiseNotImplementedError# Should be implemented in derived classesdef backward(self, output_error, lr):raiseNotImplementedError# Should be implemented in derived classesdef print_params(self):# Default implementation (optional). Child classes should override.print("Layer parameters (Not implemented in BaseLayer)")# raise NotImplementedError # Or keep NotImplementedError
/tmp/ipykernel_936812/3322560381.py:14: DeprecationWarning: __array__ implementation doesn't accept a copy keyword, so passing copy=False failed. __array__ must implement 'dtype' and 'copy' keyword arguments. To learn more, see the migration guide https://numpy.org/devdocs/numpy_2_0_migration_guide.html#adapting-to-changes-in-the-copy-keyword
return np.dot(x, self.weights) + self.bias
/tmp/ipykernel_936812/3322560381.py:19: DeprecationWarning: __array__ implementation doesn't accept a copy keyword, so passing copy=False failed. __array__ must implement 'dtype' and 'copy' keyword arguments. To learn more, see the migration guide https://numpy.org/devdocs/numpy_2_0_migration_guide.html#adapting-to-changes-in-the-copy-keyword
weight_gradient = np.dot(self.in_x.T, out_error)
epoch 35/35 error=0.002069
Code
# Make predictions with the trained model.test_images, test_labels =next(iter(test_loader))x_test = test_images.reshape(test_images.shape[0], 1, 28*28)y_test = to_categorical(test_labels, 10)print(len(x_test))# Use only the first 2 samples for prediction.out = net.predict(x_test[:2]) # Corrected slicing: use [:2] for the first two samplesprint("\n")print("Predicted values : ")print(out, end="\n")print("True values : ")print(y_test[:2]) # Corrected slicing: use [:2] to match the prediction
/tmp/ipykernel_936812/3322560381.py:14: DeprecationWarning: __array__ implementation doesn't accept a copy keyword, so passing copy=False failed. __array__ must implement 'dtype' and 'copy' keyword arguments. To learn more, see the migration guide https://numpy.org/devdocs/numpy_2_0_migration_guide.html#adapting-to-changes-in-the-copy-keyword
return np.dot(x, self.weights) + self.bias